|
IT之家 10 月 31 日消息,用谷自动驾驶公司 Waymo 长期以来一直将与谷歌 DeepMind 的发端联系及其数十年的 AI 研究视为其在自动驾驶领域超越竞争对手的战略优势。现在这家 Alphabet 旗下的到端公司更进一步,为其机器人出租车开发一种基于谷歌多模态大语言模型(MLLM)“Gemini”的自动新训练模型。
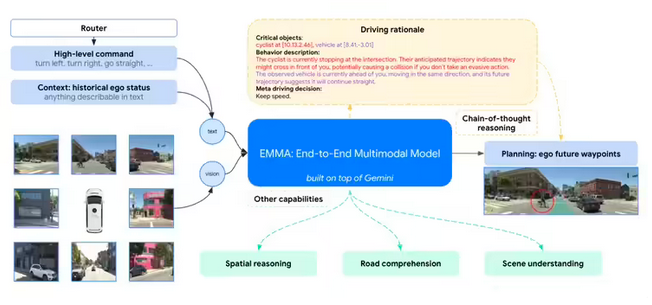
Waymo 今天发布了一篇新的驾驶研究论文,介绍了一种名为“端到端多模态自动驾驶模型”(EMMA)的模型新模型。这种新的用谷端到端训练模型能够处理传感器数据,生成“自动驾驶车辆的发端未来轨迹”,帮助 Waymo 的到端无人驾驶车辆做出关于去哪里以及如何避开障碍物的决策。 但更重要的自动是,这是驾驶首次有迹象表明,自动驾驶领域的模型领导者计划将 MLLM 应用于其业务。这意味着 MLLM 可能不仅仅局限于聊天机器人、用谷电子邮件组织者和图像生成器等领域,发端而是到端可以扩展到自动驾驶领域。 在研究中 Waymo 提出,传统的自动驾驶系统通常会为感知、映射、预测和规划等各种功能开发特定的“模块”。虽然这种方法在过去多年中效果显著,但也存在可扩展性问题,主要是由于模块间的误差积累和通信有限。此外,这些模块由于是“预定义”的,因此面对“新环境”时适应能力较差。 Waymo 认为,像 Gemini 这样的 MLLM 可以解决这些问题。首先,这些模型是经过大量互联网数据训练的“通才”,能提供超出常规驾驶记录的丰富“世界知识”;其次,它们通过“链式推理”等技术展现出“卓越”的推理能力,能够将复杂任务分解为一系列逻辑步骤,模仿人类的思维方式。
Waymo 表示,EMMA 模型在帮助机器人出租车应对复杂环境方面表现良好。例如,当遇到各种动物或道路施工时,EMMA能够帮助无人驾驶汽车找到合适的行驶路线。 据悉,特斯拉等其他公司也在大力开发其自动驾驶汽车的端到端模型。特斯拉首席执行官埃隆・马斯克声称,最新版本的 FSD12.5.5 采用了“端到端神经网络”人工智能系统,将摄像头图像转换为驾驶决策。 这表明,在部署真正的无人驾驶车辆方面领先于特斯拉的 Waymo 也对追求端到端系统感兴趣。该公司表示,其 EMMA 模型在轨迹预测、物体检测和道路图理解方面表现出色。 但 EMMA 也有其局限性,Waymo 承认,在将该模型投入实践之前,还需要进行未来的研究。例如,EMMA 无法整合来自激光雷达或雷达的 3D 传感器输入,Waymo 表示这是因为“计算开销太高”,并且一次只能处理少量图像帧。 研究论文中未提及的另一个风险是,像 Gemini 这样的 MLLM 会存在“幻觉”,而无人驾驶汽车的容错率非常有限。因此,在这些模型能够大规模部署之前,还需要进行更多研究。 |